HyperSpace
Distributed Bayesian Optimization
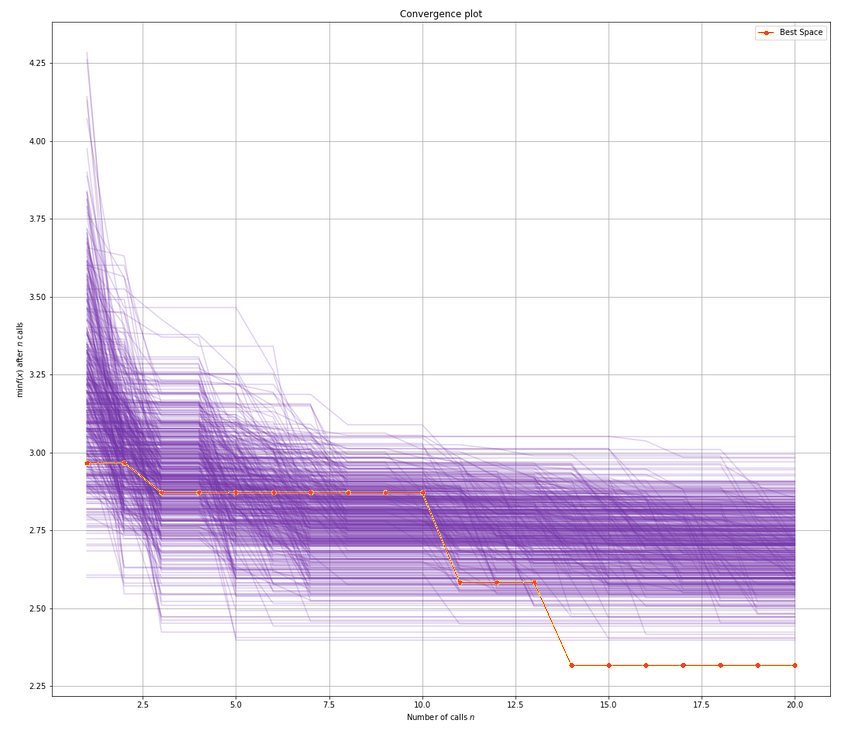
Bayesian Optimization
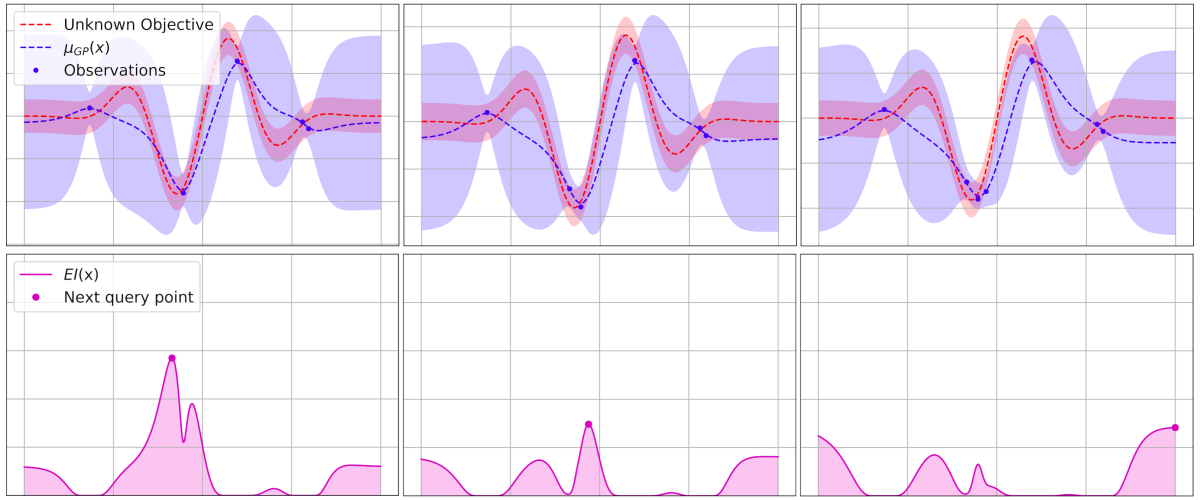
1. Sample a small, predefined number of, typically \(n=10\) points \(x_i\in X\), uniformly randomly, and compute the function values at those locations, \(f(x_1), \ldots, f(x_n)\).
2. We then model \(f\) by fitting a probabilistic model for the function. Here we assume that \(f\) is drawn from a Gaussian process.
3. We then must decide where to sample our next point, \(x_{n+1}\), from \(X\) as we seek the location of the function's minimum. This is controlled by a proxy optimization of an acquisition function* \(u:X\rightarrow \mathbb{R^{+}}\):
Bayesian Optimization
Limitations of Bayesian Optimization
1. Sequential by nature.
2. Exponential scaling.
The number of samples required to bound our uncertainty about the optimization procedure is scales exponentially with the number of search dimensions, as in \(2^{D}\), where \(D\) is number of dimensions [1, 2]. This has been forgotten in the recent excitement of Bayesian optimization.
1. N. Srinivas, A. Krause, S. M. Kakade, and M. W. Seeger. Gaussian process bandits without regret: An experimental design approach. CoRR, abs/0912.3995, 2009.
2. S. Grunewalder, J.-Y. Audibert, M. Opper, and J. Shawe-Taylor. Regret Bounds for Gaussian Process Bandit Problems. In AISTATS 2010 - Thirteenth International Conference on Artificial Intelligence and Statistics, volume 9, pages 273–280, Chia Laguna Resort, Sardinia, Italy, May 2010.
HyperSpace Approach
1. Parallelism that focuses on the search space.
2. Build many surrogate functions in parallel.
3. Prayer.
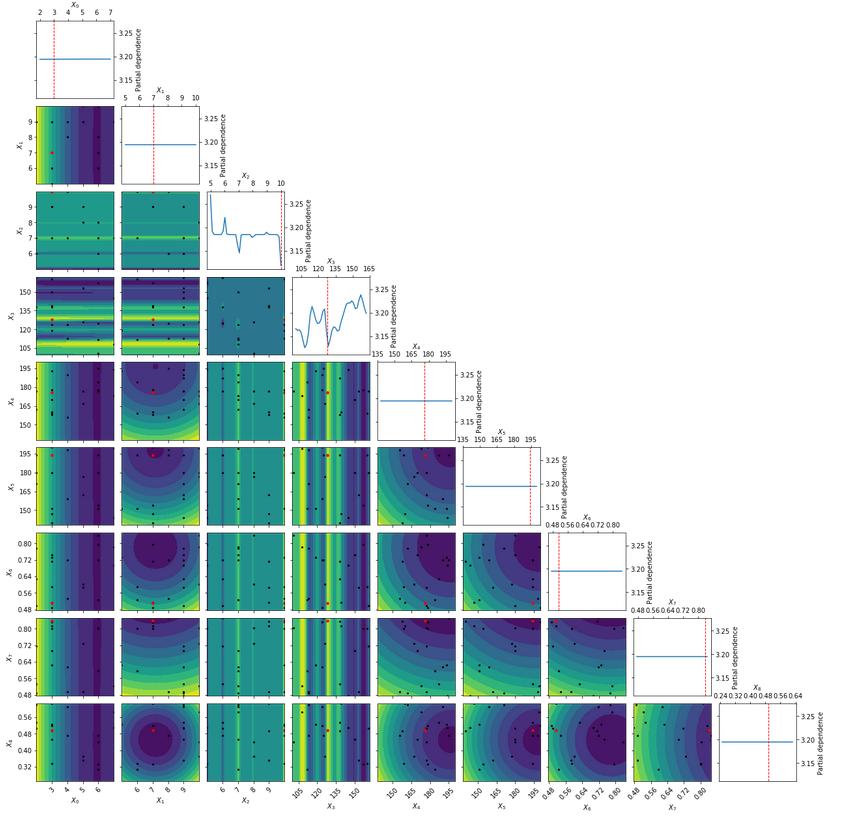
Partitioning
the
search
space
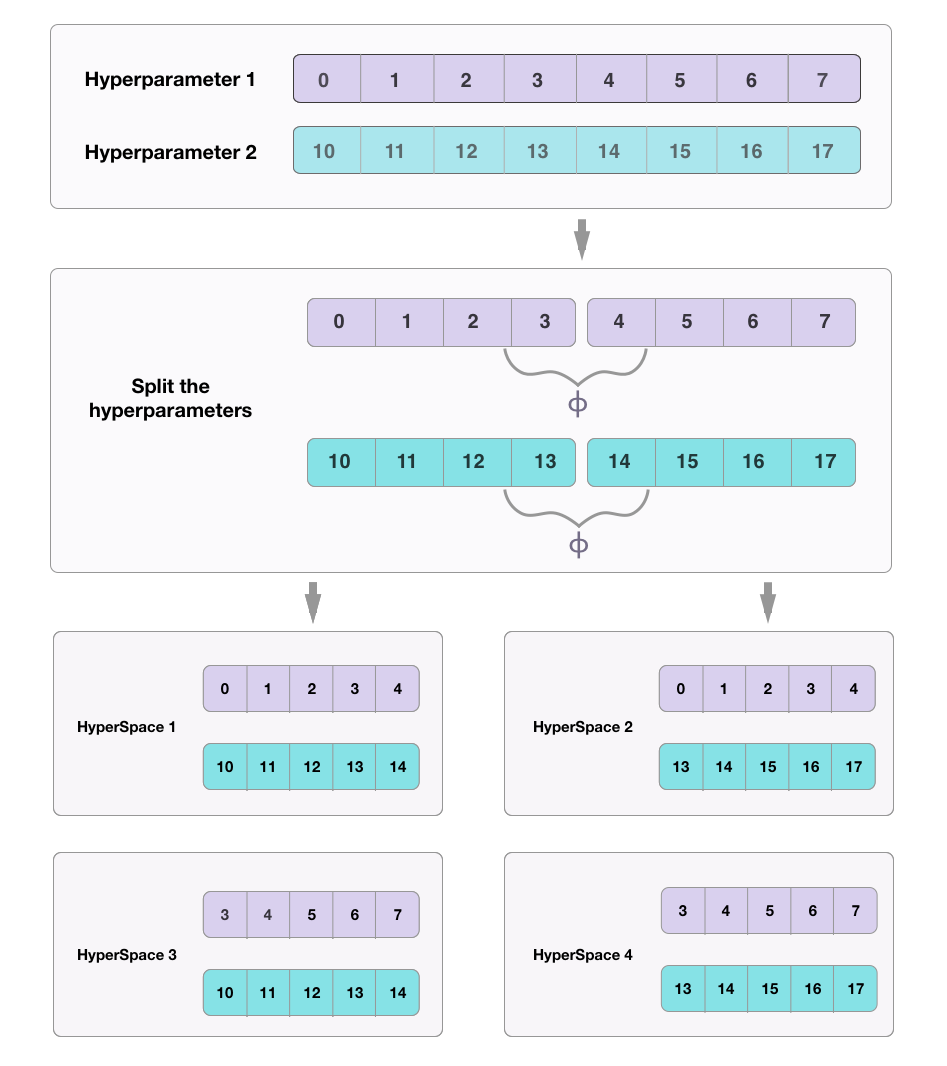
Partitioning the Search Space
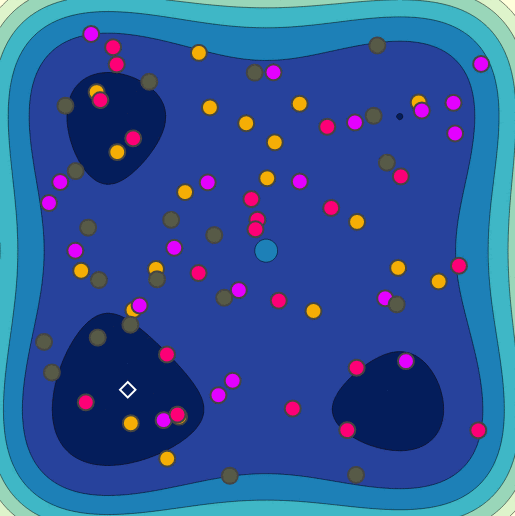
Styblinski-Tang Function
Styblinski-Tang Function
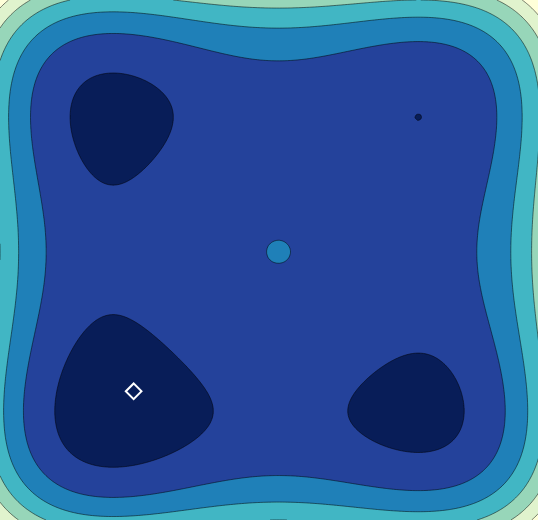
Styblinski-Tang Function
Random Search
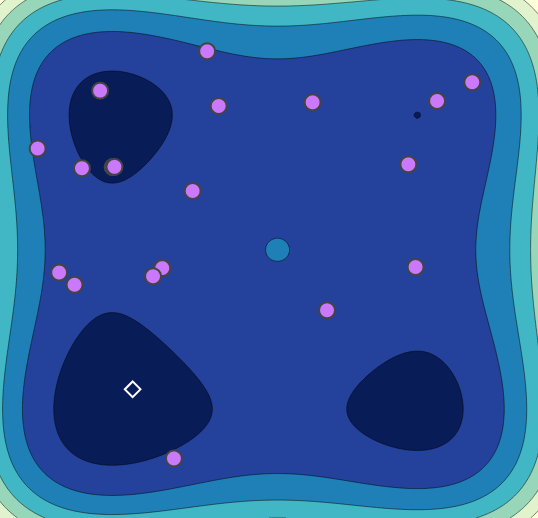
Bayesian Optimization
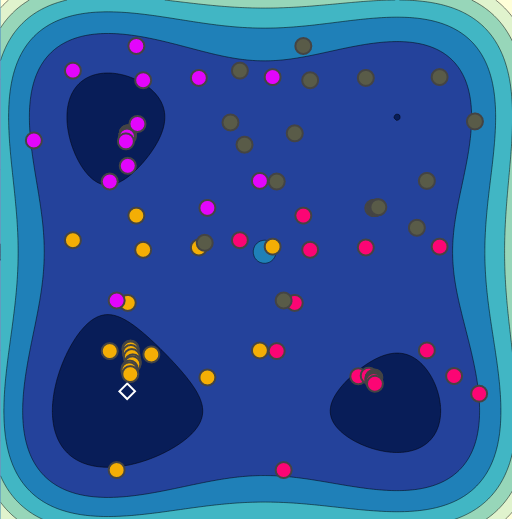
HyperSpace
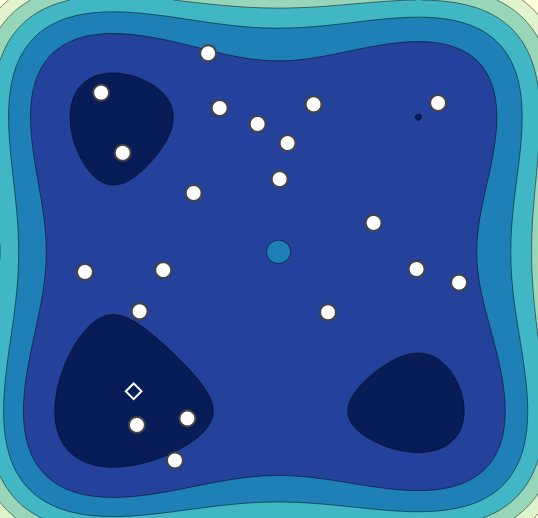
Random Search
Bayesian Optimization
HyperSpace
Sample Comparison
from hyperspace import hyperdrive
def objective(params):
"""
Objective function to be minimized.
"""
param0, param1, param2 = params
model = Model(param0, param1, param3)
train_loss = train(model)
val_loss = validate(model)
return val_loss
def main():
hparams = [(2, 10), # param0
(10.0**-2, 10.0**0), # param1
(1, 10)] # param2
hyperdrive(objective=objective,
hyperparameters=hparams,
results_path='/path/to/save/results',
model="GP",
n_iterations=15,
verbose=True,
random_state=0,
sampler="lhs",
n_samples=5,
checkpoints=True)
if __name__ == '__main__':
main()HyperSpace is Open Source
https://github.com/yngtodd/hyperspace
References
1. N. Srinivas, A. Krause, S. M. Kakade, and M. W. Seeger. Gaussian process bandits without regret: An experimental design approach. CoRR, abs/0912.3995, 2009.
2. S. Grunewalder, J.-Y. Audibert, M. Opper, and J. Shawe-
Taylor. Regret Bounds for Gaussian Process Bandit Problems. In AISTATS 2010 - Thirteenth International Conference on Artificial Intelligence and Statistics, volume 9, pages 273–280, Chia Laguna Resort, Sardinia, Italy, May 2010.
3. Li, K. Jamieson, G. DeSalvo, A. Rostamizadeh, and A. Talwalkar. Hyperband: A novel bandit-based approach to hyperparameter optimization. In International Conference on Learning Representations (ICLR2017). CBLS, April 2017
Supplemental Material
Bayesian Optimization in Detail
1. Sample a small, predefined number of, typically \(n=10\) points \(x_i\in X\), uniformly randomly, and compute the function values at those locations, \(f(x_1), \ldots, f(x_n)\).
2. We then model \(f\) by fitting a probabilistic model for the function. Here we assume that \(f\) is drawn from a Gaussian process.
3. We then must decide where to sample our next point, \(x_{n+1}\), from \(X\) as we seek the location of the function's minimum. This is controlled by a proxy optimization of an acquisition function* \(u:X\rightarrow \mathbb{R^{+}}\):
The acquisition function balances two competing aims: the need to explore the domain of our objective function and the desire to exploit points on the domain which may be the global minimum of the function. By default, HyperSpace uses the Expected Improvement function, but there are several options available.
Acquisition Functions
Expected Improvement:
where \(f(x^{*})\) is the minimal observed value of \(f\) thus far and \(E[\cdot]\) denotes expectation over the random variable \(f(x)\). We therefore receive a reward equal to the "improvement" \(f(x^{*}) - f(x)\) when \(f(x)\) is less than \(f(x^{*})\), and no reward otherwise. Given the GP's predictive mean and variance functions, the right hand side of the above equation can be re-expressed as
where \(\Phi\) is the standard normal cumulative distribution function, \(\phi\) is its derivative, and \(Z = \frac{f(x^{*}) - \mu(x)}{\sigma(x)}\).
Parallel Random Search
Parallel Random Search
HyperSpace
Sample Comparison